DUALIS Mobile Robots für Visual Components
AGVs detailgetreuer simulieren und effizienter auswerten
- Detailgetreuere Simulation
- Effiziente Streckenplanung und Aufgabenverwaltung
- Intelligentes Flottenmanagement
- Manuelles Missionsmanagement
- Detaillierte Auswertung für die weitere Optimierung

Simulation komplexer, fahrerloser Transportsysteme leicht gemacht
Vor allem im Bereich der Intralogistik können Unternehmen schnell Material- und Warenflüsse optimieren und damit Kosten reduzieren. Automatisierte Lösungen wie fahrerlose Transportsysteme (kurz FTS oder AGV) bieten dabei ein besonders hohes Optimierungspotential. Aufgrund ihrer Komplexität sind diese mit konventionellen statischen Auslegungsmethoden nur unzureichend abbildbar.
Für eine schnelle Simulation von AGVs stellt die 3D-Simulationsplattform Visual Components zahlreiche Funktionalitäten bereit. Um die Komplexität solcher Systeme in der Praxis präziser und einfacher darstellen zu können, haben wir eine neue Bibliothek entwickelt, die sich nahtlos in die Standardbibliothek zur Prozessmodellierung von Visual Components integrieren lässt.
Umfangreichere Strategieauswahl und AGVs mit erweitertem Funktionsumfang
Verglichen mit Standardlösungen stehen den Anwendenden umfangreichere Stellschrauben und Möglichkeiten für die Priorisierung bei Bestimmung des Transportziels, der Ressource und der Arbeitsreihenfolge zur Verfügung. Zudem lassen sich feste Arbeitsabläufe für die Ressourcen definieren und Aufgaben an spezifische AGVs oder Fahrzeuggruppen zuweisen und damit auch unterschiedliche Fahrzeugtypen in einem Layout vereinen. Für die Konfiguration der AGVs ist u.a. eine vollständig parametrierbare, herstellerunabhängige Fahrzeuggeometrie verfügbar. Mit unserer Bibliothek lassen sich auch weitere übliche Bewegungsabläufe abbilden, die im Standardumfang der Visual Components Software nicht enthalten sind, z.B. für Gabelstapler-AGVs oder AGVs, die sich nicht drehen, sondern kartesisch fahren.

Streckendefinition als Netzwerk und Bewegung der AGVs im Netzwerk
Mit der DUALIS AGV-Bibliothek definieren Sie die Fahrwege der AGVs genauer und visuell übersichtlicher als Netzwerk aus Knoten und Verbindungen. Knoten lassen sich dabei flexibel als Prozess-, Lade- und Wartepunkte definieren. Jede beliebige externe Prozesskomponente kann durch Zuordnung zu einem Knoten in das Netzwerk eingebunden werden. Auch Kurvenfahrten sind möglich. Die durchdachte Streckendefinition als kapazitätsbasierten Netzwerkes garantiert einen vollständig kollisionsfreien Bewegungsablauf. Unser simulationsinterner Flottenmanager verfügt über intelligente Algorithmen zur Berechnung der optimalen Fahrstrecke und Lösungen für Fahrzeugbegegnungen.
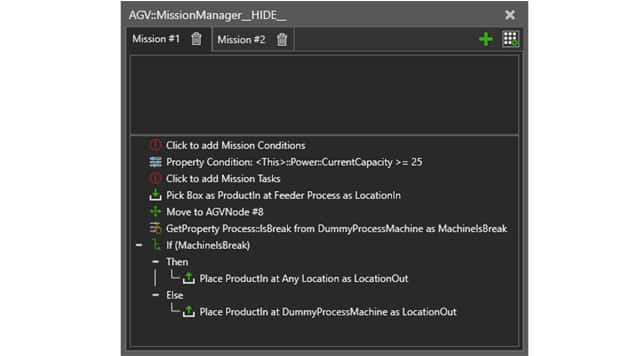
Feste Arbeitsreihenfolge und situationsabhängiges Verhalten
Mit dem Missionsmanager kann der Nutzer Einfluss auf die auszuführenden Aufträge und deren Reihenfolge nehmen. Dabei punktet unser Ansatz mit einer deutlich übersichtlicheren Konfiguration und einem stark gesteigertem Funktionsumfang verglichen mit in der Standardsoftware vorhandenen Ansätzen. Die Vorgabe von festen Arbeitsreihenfolgen ermöglicht die Simulation von Routenzügen. Durch die Verwendung von Kontrollstrukturen und Arbeit mit Variablen kann ein situationsabhängiges Verhalten der Ressource definiert werden. Damit lassen sich viele Situationen abbilden, die zuvor mit zusätzlichem Programmieraufwand verbunden waren.
Best Practice: Präzise Planung von AGVs sorgt für Investionssicherheit bei Fabmatics
Mobile Robots Bibliothek seit 2022 im Einsatz

Martin Däumler
Department Manager Product Development & Product Support, Fabmatics GmbH
Sonderanwendungsfall AGV-Simulation: Doppelte Swap
Ein AGV (Automated Guided Vehicle) bringt eine Ladung zu einer Station, legt sie dort ab und nimmt an der selben Stelle eine neue Ladung auf – und das gleich zweimal hintereinander. Dadurch entfällt der Einsatz von zwei separaten AGVs für die jeweilige Aufgabe, da ein einziges AGV beide Tätigkeiten effizient ausführen kann.
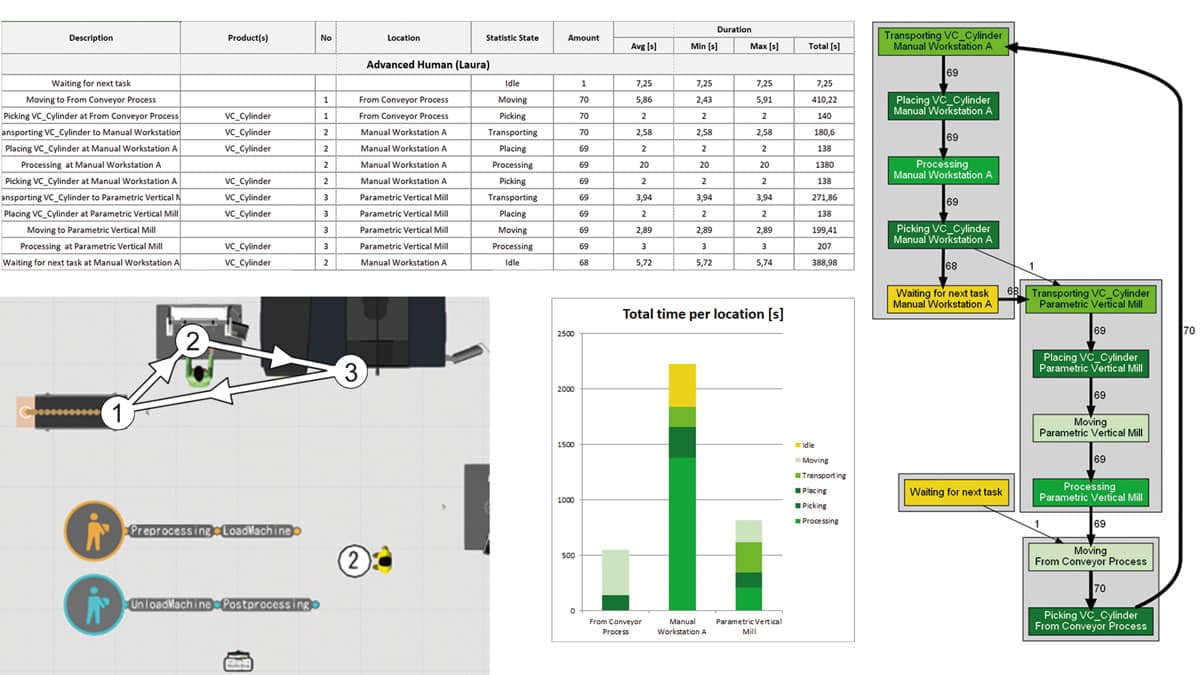
Stellschrauben zur weiteren Optimierung identifizieren
Die DUALIS AGV-Bibliothek ist kombinierbar mit dem DUALIS Statistik-Modul. Damit erzeugen Sie mit nur einem Klick einen ausführlichen Excel-Report, der Ihnen alle wichtigen Kennzahlen zur AGV-Simulation aufführt und visuell ansprechend darstellt. Auch ein Szenariovergleich ist möglich. Damit erkennen Sie schnell, an welchen Stellschrauben Optimierungspotential besteht oder welche Variante am besten funktioniert und Ihnen den größten Output bringt. Zukünftig soll dies durch einen automatisierten Szenariomanager noch einfacher möglich sein.
Weitere Funktionen geplant
Die bisherige Resonanz war überwältigend. Gespräche mit unseren Kunden haben ergeben, dass weitere Funktionalitäten gewünscht sind. Daher entwickeln wir unsere Mobile Robots Bibliothek kontinuierlich weiter. Um die Möglichkeiten bei der virtuellen Inbetriebnahme von AGVs für Anwendende zu erweiteren, arbeiten wir derzeit an einer Lösung zur Anbindung des iTAC Control Moduls und externer Flottenmanager wie BlueBotics. Durch die Auslagerung der in der Simulation abgebildeten Regeln und Algorithmen an die realen Systeme, ist ein noch realistischeres Ergebnis möglich.

Machen sie den nächsten Schritt!
Sie möchten mehr erfahren oder wollen die DUALIS Mobile Robots Bibliothek kostenlos testen? Dann füllen Sie gern unser Kontaktformular aus. Unser Team meldet sich umgehend bei Ihnen, um einen individuellen Beratungstermin mit Ihnen zu vereinbaren. Gerne stellen wir Ihnen das Add-on im Rahmen einer individuellen Live-Demo vor und gehen dabei auf Ihre speziellen Anforderungen und Herausforderungen ein.
